





















Tutti i prodotti
-
Visione notturna a infrarossi multifunzionale portatile
-
Robot per lo smaltimento di esplosivi
-
Robot di ricognizione in miniatura
-
Visione notturna digitale monoculare
-
Dispositivo di visione notturna digitale
-
Anti-Sniper
-
Radar portatile
-
Lanterna di registrazione di pattuglia
-
Equipaggiamento tattico per operazioni speciali
-
Portata del fucile
-
Telemetro del laser
-
Modello militare
-
attrezzature tattiche
-
Esca gonfiabile
Dispositivo di esplosivi leggeri Robot EOD Hound-I







| Luogo di origine | Cina |
|---|---|
| Marca | Particle |
| Numero di modello | REOD400 |
| Prezzo | $102,881 |
| Termini di pagamento | T/T |

Contattimi gratis campioni e buoni.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se avete di preoccupazione, forniamo la guida in linea di 24 ore.
xDettagli
| dimensione | ≤ 830 mm × 600 mm × 460 mm ((Completamente riempito) | Peso | ≤ 37 kg ((Contiene due serie di batterie) |
|---|---|---|---|
| Sulla capacità di superare gli ostacoli | ≥300mm | Larghezza della scanalatura | ≥400MM |
| Gradibilità | ≥45° | Salire le scale | ≥45° |
| Articulazioni mobili | 8 | Distanza di presa massima | ≥ 1650 mm |
| Larghezza massima di apertura della pinza | ≥160mm | Carico utile | 6-16 kg |
| Metodo di funzionamento | Operazione in doppia modalità del pulsante e del touch screen | Metodo di controllo | Controllo via cavo ≥ 100m ((cavo standard),controllo wireless ≥ 1000m ((all'aperto) |
| Durata della batteria (temperatura normale) | ≥2H | Grado IP | Protezione IP66 |
| Evidenziare | Robot da caccia,Robot per la eliminazione di esplosivi,Eod robot leggero |
||
Descrizione di prodotto
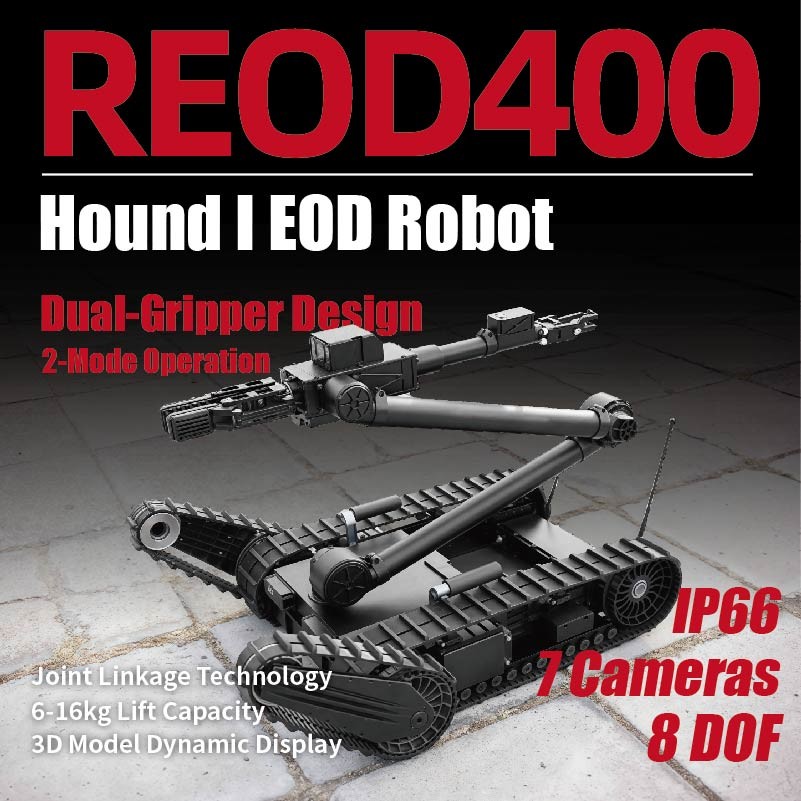
Dispositivo di esplosivo leggero robot EOD Hound-I
Descrizione e caratteristiche
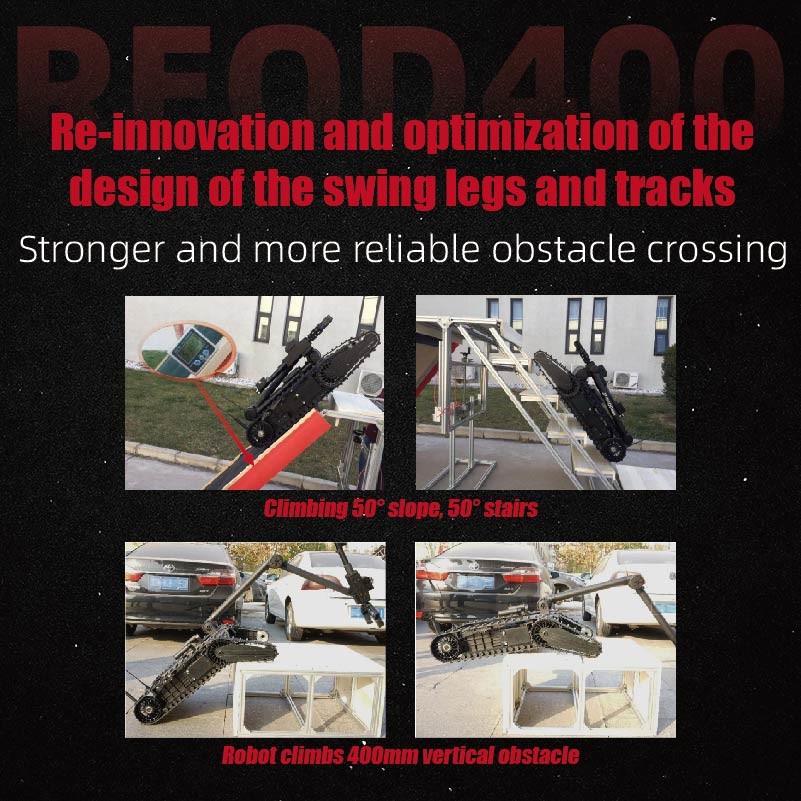
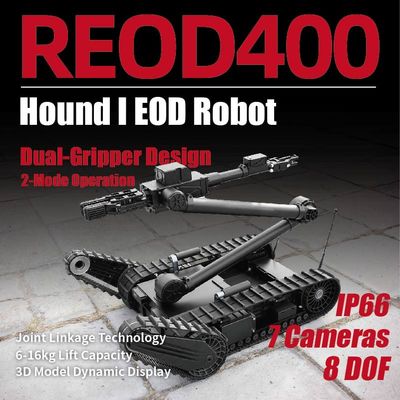
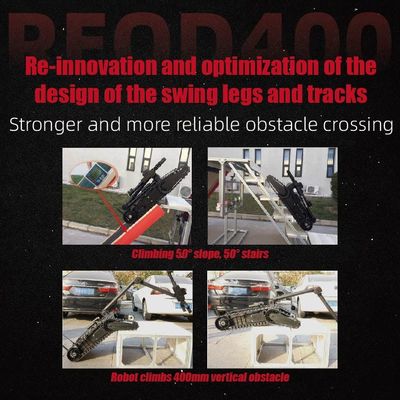
Il robot REOD400 EOD è una soluzione avanzata per lo smaltimento di ordigni esplosivi (EOD) in ambienti ad alto rischio.rendendolo altamente efficiente per operazioni come il terrorismo urbanoIl robot è compatto e leggero, con dimensioni di ≤830 mm × 600 mm × 460 mm (completamente riempito) e un peso di ≤37 kg.ha una velocità massima ≥ 10,8 m/s con 5 marce e azionamento variabile continuo, distanza da ostacoli ≥ 300 mm e capacità di graduazione e di salita delle scale fino a 45°,garantire una manovrabilità e una capacità di adattamento superiori in vari terreni.
Equipaggiato con 8 gradi di libertàManipolatore, il REOD400 offre un controllo preciso con un'altezza massima di presa ≥ 1700 mm (granchia principale) e una distanza di presa massima ≥ 1380 mm (granchia principale).consentire prospettive di osservazione più ricche, dotato di funzionalità di visualizzazione in tempo reale della postura 3D a distanza, con una durata della batteria di ≥ 2 ore a temperatura normale, con classificazione IP66 per resistenza alla polvere e all'acqua,e metodi di controllo che comprendono il controllo via cavo fino a 100 m e il controllo wireless fino a 1000 m, il REOD400 è costruito per l'affidabilità e la versatilità in condizioni difficili.
Progettazione innovativa "doppia presa"
L'innovativo progetto "Dual Gripper" presenta un braccio robotico dotato sia di un "garro di presa primario" che di un "garro di estensione multifunzionale".Questo progetto migliora notevolmente la flessibilità e la fattibilità del robot nell'esecuzione di compiti, fornendo un sostegno efficace per completare una varietà di compiti in una singola operazione.Il progetto "Dual Gripper" affronta efficacemente i limiti dei tradizionali robot per lo smaltimento delle bombe che hanno solo una "singola pinza"," che non può svolgere simultaneamente compiti come "afferrare oggetti pericolosi" e "aprire porte, tagliare, fissare, tagliare, agganciare e altre azioni ausiliarie".Può svolgere compiti come "aprire una porta e afferrare un oggetto in una sola volta". "
La progettazione "Dual Gripper" libera con successo il "garro di presa primario" dal dover eseguire funzioni diverse dalla presa, migliorando così in modo significativo le capacità di presa del robot.L' artiglio primario può afferrare oggetti pericolosi sospetti di 6-16 kg di peso, con una larghezza di presa fino a 160 mm e una forza di fissaggio massima di 300 N. Inoltre, a seconda delle specifiche funzioni operative,il "sett di attrezzi per la pinza" può essere sostituito rapidamente per gestire diversi tipi e forme di oggetti pericolosi.
Supporto per il controllo touch / joystick interazione più user-friendly e funzionamento affidabile
La progettazione grafica del controllo touch/joystick è attualmente una delle principali soluzioni di controllo dei robot di disinnescamento delle bombe a livello internazionale.È stato molto riconosciuto dagli utenti per la sua interazione più user-friendly e funzionamento affidabileLe sue caratteristiche principali sono le seguenti:
- Progettazione grafica dell'operazione:Tutte le operazioni sono progettate in modo grafico, eliminando la necessità per gli utenti di memorizzare complesse funzioni dei pulsanti e protocolli operativi.Questa interfaccia user-friendly rende il funzionamento semplice e intuitivo, riducendo significativamente il tempo di formazione.
- Disegno di funzionamento del controllo touch/joystick:Sia i pulsanti del joystick che uno schermo touchscreen possono essere utilizzati per eseguire tutte le operazioni del robot.La ridondanza fornita da questi due metodi di funzionamento non solo aumenta l'affidabilità del sistema ma migliora anche l'efficienza operativa combinando pulsanti joystick con comandi touchscreen.
|
|
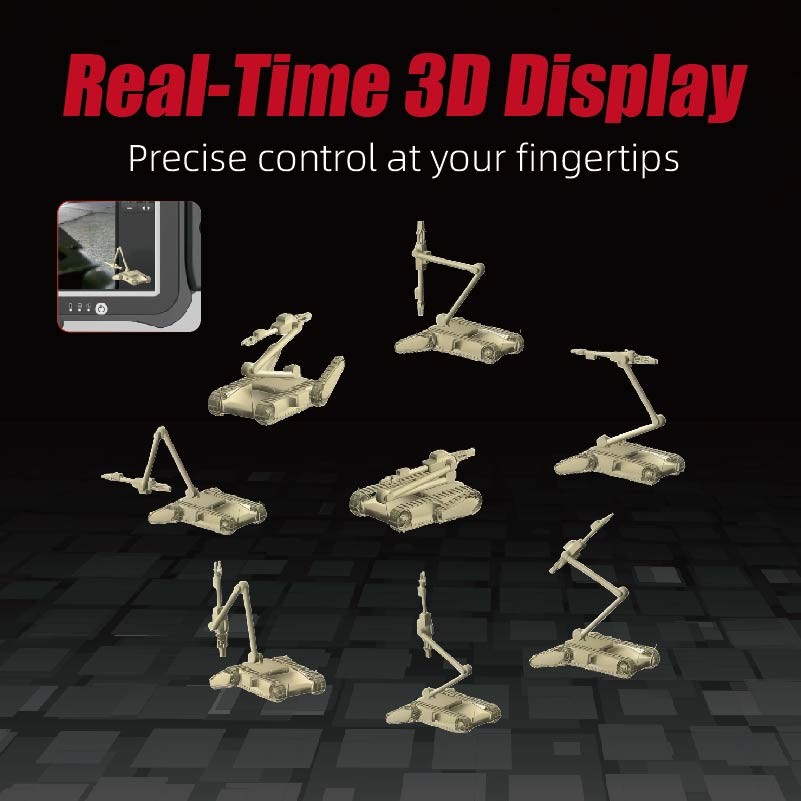
Display 3D in tempo reale remoto
Poiché i robot disinnescanti spesso operano al di là della linea visiva durante le missioni, le informazioni in tempo reale sugli angoli e sulle posizioni spaziali delle articolazioni del robot sono cruciali per gli operatori. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusQuesto fa sì che il robot si senta "vicino" anche quando è "lontano", consentendo un funzionamento più intuitivo.
Le caratteristiche principali del display 3D in tempo reale a distanza sono le seguenti:
- Visualizzazione in tempo reale dello stato 3D del robot
- Osservazione dello stato 3D del robot da varie angolazioni
- Zoom in e out dello stato 3D del robot
Il controller portatile del robot riproduce lo stato 3D remoto del robot, consentendo di ingrandire, ingrandire e osservare il modello 3D da qualsiasi angolazione.
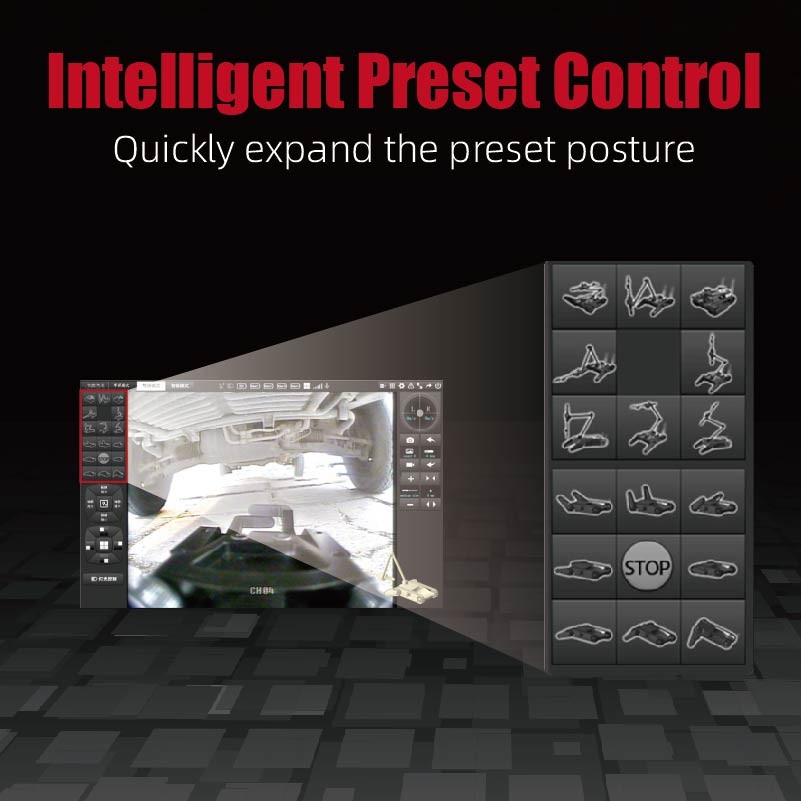
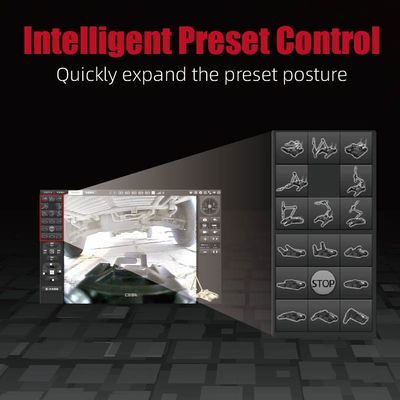
Progettazione intelligente per il controllo della postura predefinita
Con l'"Intelligent Preset Posture Control for Common Tasks", il robot può "arrivare automaticamente a una posizione prestabilita con un solo clic" in base alle esigenze dell'utente.Questa caratteristica riduce notevolmente la quantità di manovra manuale necessaria sul posto, che funge da assistente efficace per gli operatori in prima linea e migliora l'affidabilità e la sicurezza delle attività di smaltimento delle bombe.
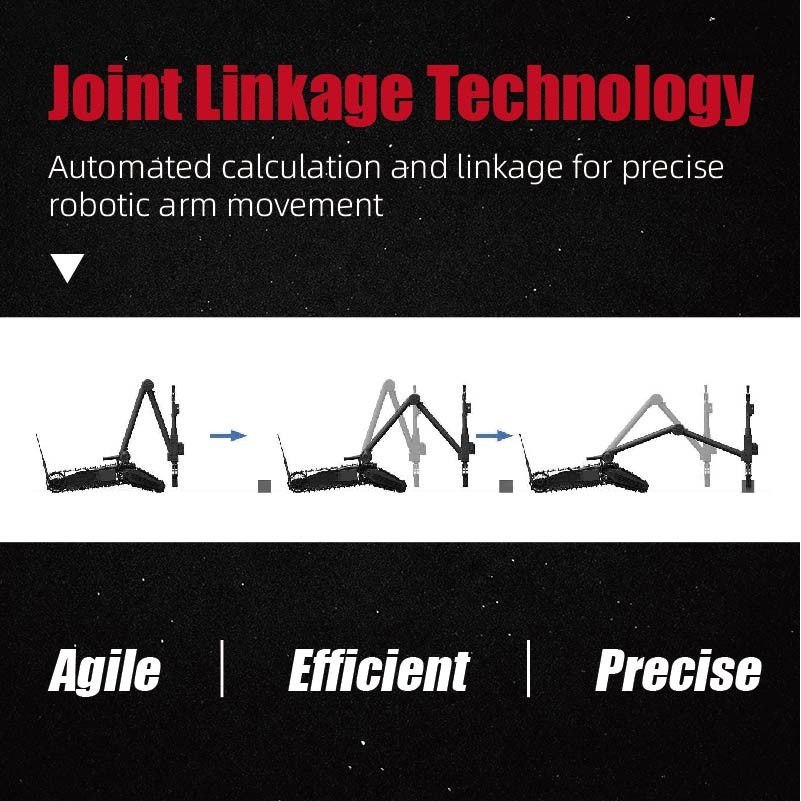
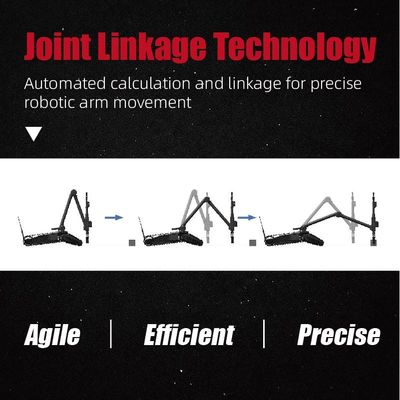
Tecnologia di collegamento articolato "X-Y-Z"
Il progetto di funzionamento della tecnologia di collegamento articolato X-Y-Z basato sul calcolo automatico, noto anche come "progetto di controllo della traslazione della pinza basato su coordinate cartesiane"," trasforma il tradizionale controllo "single-joint" dei robot anti-bomba in "multi-joint coordinated control"Questo migliora notevolmente l'efficienza operativa e la precisione dei robot per lo smaltimento delle bombe. Rispetto alla progettazione di controllo "single joint", riduce il tempo medio di funzionamento dell'80%.
Per afferrare oggetti pericolosi sospetti in uno spazio orizzontale unidimensionale,si controlla rapidamente il robot per ottenere "movimento coordinato multi-articolazione" per la trasformazione unidimensionale spaziale pinzaCiò riduce notevolmente la difficoltà operativa e aumenta la precisione, consentendo un posizionamento quasi immediato senza la necessità di ripetizioni.
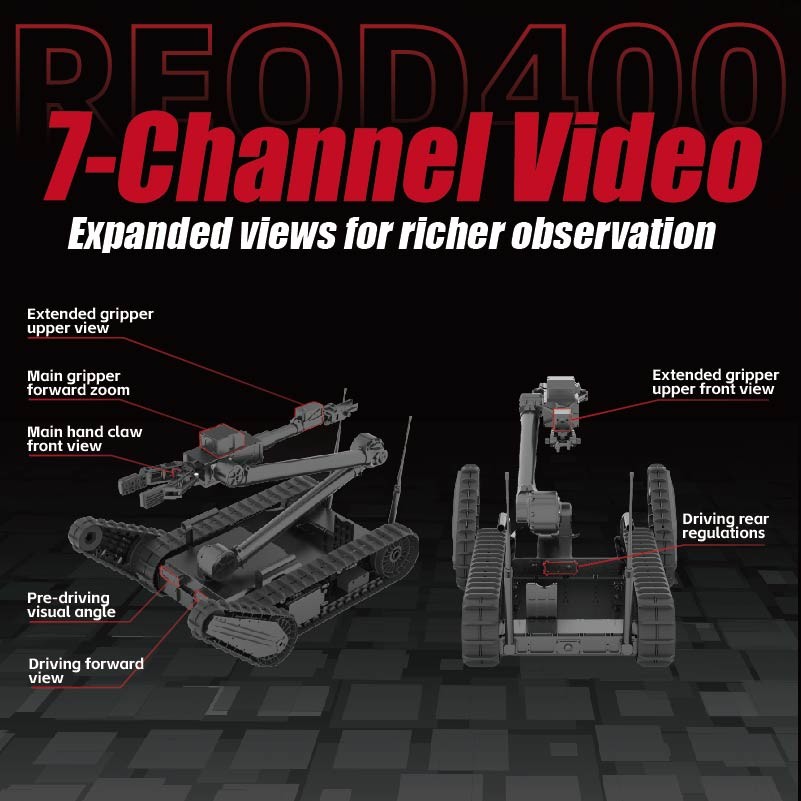
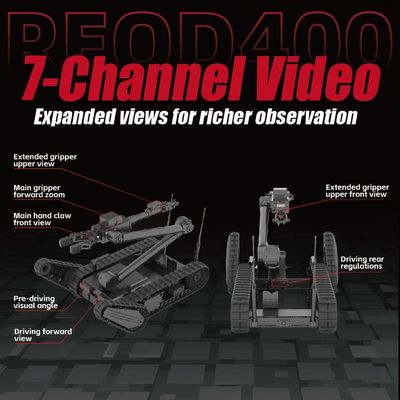
Sistema di imaging adattivo alla modalità 7 posizioni della telecamera per una migliore osservazione
Il sistema di imaging del robot funge da occhio dell'operatore.miglioramento significativo della capacità degli operatori di prima linea di percepire gli ambienti remotiLa progettazione del sistema a 7 telecamere non è una semplice disposizione, ma piuttosto un miglioramento e un'ottimizzazione basati sui problemi incontrati dagli utenti durante l'uso effettivo.
Il sistema di imaging è generalmente suddiviso in tre combinazioni di immagini: modalità guida, modalità gripper primaria e modalità gripper estesa.Si passa automaticamente tra queste modalità in base a compiti tipici come la guida, afferrare e osservare, offrendo una maggiore consapevolezza ambientale remota e una gamma più ricca di angolazioni di osservazione.
Progettazione del braccio robotico integrato con otto gradi di libertà
Il braccio robotico REOD400 presenta un design integrato a 8 gradi di libertà, fornendo forti capacità di raggiungimento spaziale.Questa progettazione permette al braccio robotico di svolgere non solo compiti di smaltimento di bombe convenzionali, ma anche operazioni che i normali robot di smaltimento di bombe a 5 o 6 gradi di libertà non possono gestire, come afferrare oggetti in ambienti alti, bassi e profondi, o su un tavolo, nonché condurre ricognizione multiangolare in ambienti alti, bassi e profondi.
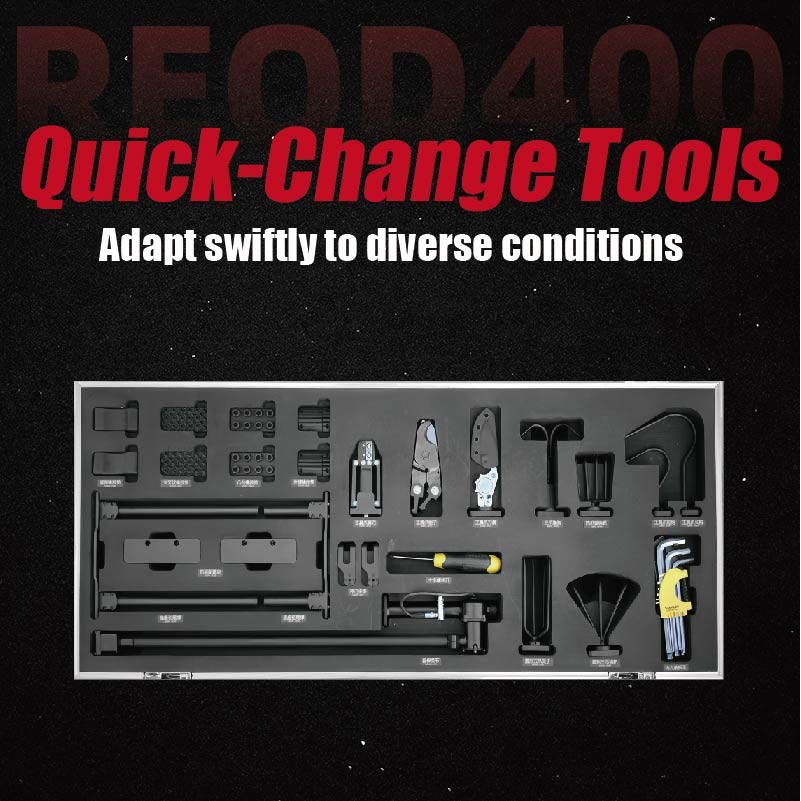
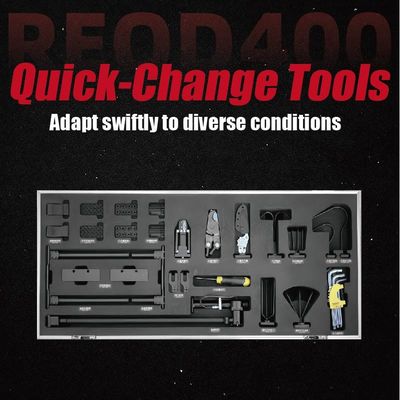
Sistema di cambio rapido di attrezzi versatile
Il robot REOD400 è dotato di 18 tipi di "strumenti di cambio rapido", tra cui 6 set di strumenti di presa, 6 set di strumenti di base e 6 set di strumenti estesi,che consente la rapida sostituzione dei "confittori di attrezzature di presa" in base a diversi compiti operativi e ai tipi e alle forme dei vari oggetti pericolosi, soddisfacendo così le diverse esigenze operative degli utenti.
Applicazioni
Galleria di immagini
Parametri tecnici
|
Piattaforma robot |
|
|
Dimensione |
≤ 830×600×460 mm ((Completamente riempito) |
|
Peso |
≤ 37 kg (contiene due serie di batterie) |
|
Velocità massima |
≥ 1,8 m/s ((5 marce, variabile continuamente) |
|
Sulla capacità di superare gli ostacoli |
≥300 mm |
|
Larghezza della scanalatura |
≥ 400 mm |
|
Gradibilità |
≥ 45° |
|
Salire le scale |
≥ 45° |
|
Durata della batteria (temperatura normale) |
≥ 2 ore |
|
Grado IP |
Protezione IP66 |
|
Performance di afferramento del braccio robotico |
|
|
Stato esteso |
≥ 6 kg |
|
Stato ritirato |
≥ 16 kg |
|
Artigli |
2 |
|
Articulazioni mobili |
8 |
|
Altezza massima di osservazione |
≥2400 mm |
|
Altezza massima di presa |
≥1700 mm(Artiglio principale),≥2000 mm(Vice-claver) |
|
Distanza di presa massima |
≥1380 mm(Artiglio principale),≥ 1650 mm(Vice-claver) |
|
Larghezza massima di apertura della pinza |
≥160 mm |
|
Controller portatile |
|
|
Dimensione |
≤360 × 210 × 70 mm |
|
Peso |
≤ 2 kg ((senza zaino) |
|
Schermata di visualizzazione |
10.1' LCD |
|
Visualizzazione video |
7 canali |
|
Metodo di funzionamento |
Funzionamento in doppia modalità del pulsante d'oscillazione e dello schermo touch |
|
Metodo di controllo |
Controllo via cavo ≥100m ((cavo standard),controllo wireless ≥1000m ((all'aperto) |
Contattaci
Signorina Amy.
E-mail:amy-huang@mysmech.com
Prodotti raccomandati