





















Tutti i prodotti
-
Visione notturna a infrarossi multifunzionale portatile
-
Robot per lo smaltimento di esplosivi
-
Robot di ricognizione in miniatura
-
Visione notturna digitale monoculare
-
Dispositivo di visione notturna digitale
-
Anti-Sniper
-
Radar portatile
-
Lanterna di registrazione di pattuglia
-
Equipaggiamento tattico per operazioni speciali
-
Portata del fucile
-
Telemetro del laser
-
Modello militare
-
attrezzature tattiche
-
Esca gonfiabile
X-Y-Z Coordinate Robotic Arm Robot EOD di medie dimensioni







| Luogo di origine | Cina |
|---|---|
| Marca | Particle |
| Numero di modello | REOD500 |
| Quantità di ordine minimo | 1 |
| Prezzo | $205,761 |
| Termini di pagamento | T/T |

Contattimi gratis campioni e buoni.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se avete di preoccupazione, forniamo la guida in linea di 24 ore.
xDettagli
| Velocità massima | ≥ 2m/s ((5 marce, variabile continuamente) | Caratteristiche particolari | Proof-of-explosion, waterproof, capacità di disarmo remoto |
|---|---|---|---|
| Nome del prodotto | Obiettivi della missione Hound-III Robot EOD per le misure di smaltimento e il trasferimento dei ris | Caratteristiche | 1. Disegno di braccio meccanico di alta resistenza, conferisce una potente prestazione di rapimento; |
| Peso della piattaforma del robot | ≤ 350 kg ((Contiene batterie); | Profondezza della piattaforma robot | ≥ 500 mm; |
| Applicazioni | Risposta agli esplosivi improvvisati | Dimensione della piattaforma del robot | 1600×850×1300 mm ((Completamente riempito); |
| Dimensione del robot | ≤ 950×650×650 mm ((Completamente riempito) | Peso del robot | ≤ 50 kg ((Contiene due serie di batterie) |
| Sulla capacità di superare gli ostacoli | ≥400MM | Larghezza della scanalatura | ≥400MM |
| Gradibilità | ≥45° | Salire le scale | ≥45° |
| Profondezza di ormeggio | ≥200mm | Durata della batteria (temperatura normale) | ≥3h |
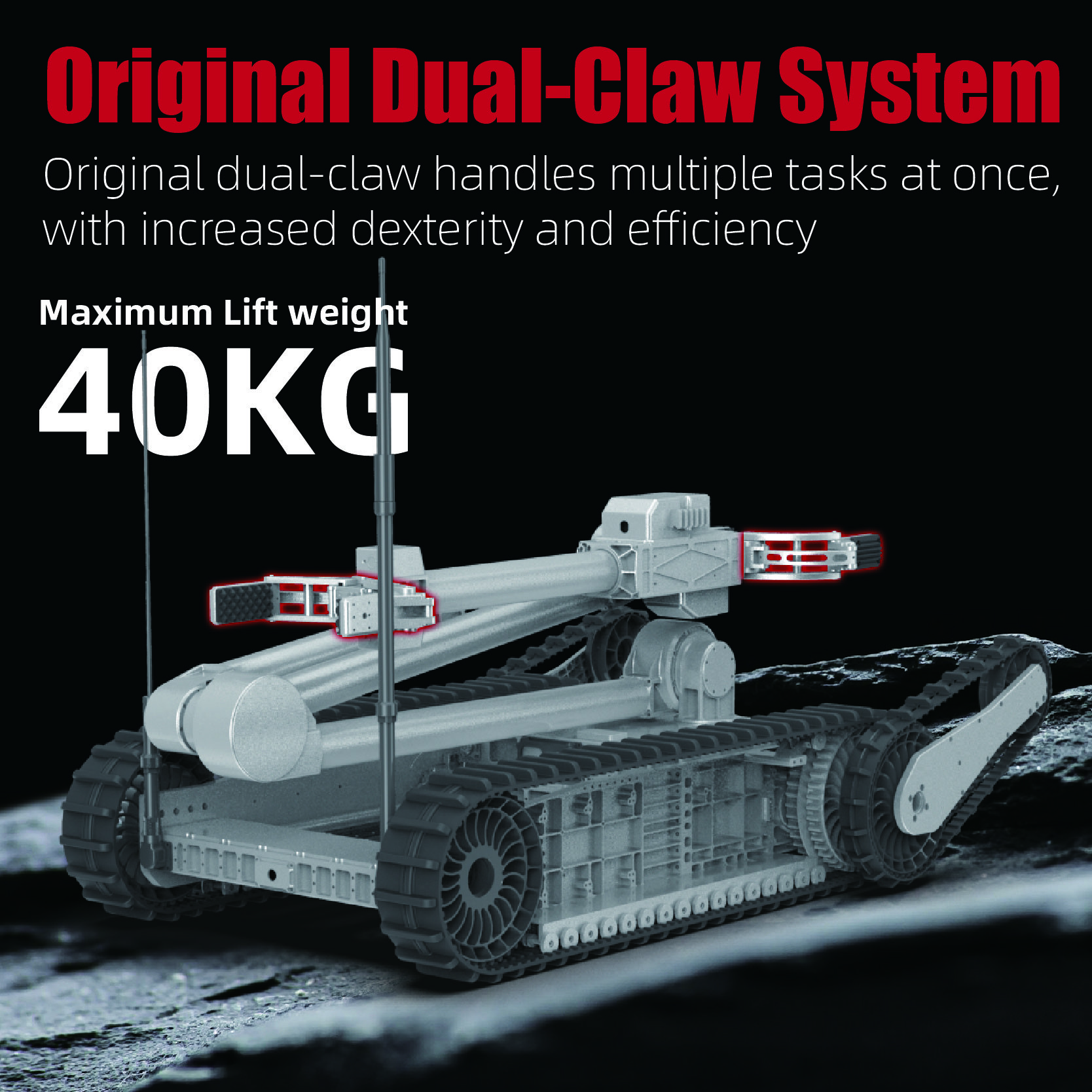
| Lunghezza del braccio | 2000 mm | Peso massimo della rapina | ≥ 40 kg |
| Artigli | 2 | Articulazioni mobili | 8 |
| Dimensione del regolatore | ≤ 270 mm × 170 mm × 100 mm | Peso del regolatore | ≤ 1,2 kg ((senza zaino) |
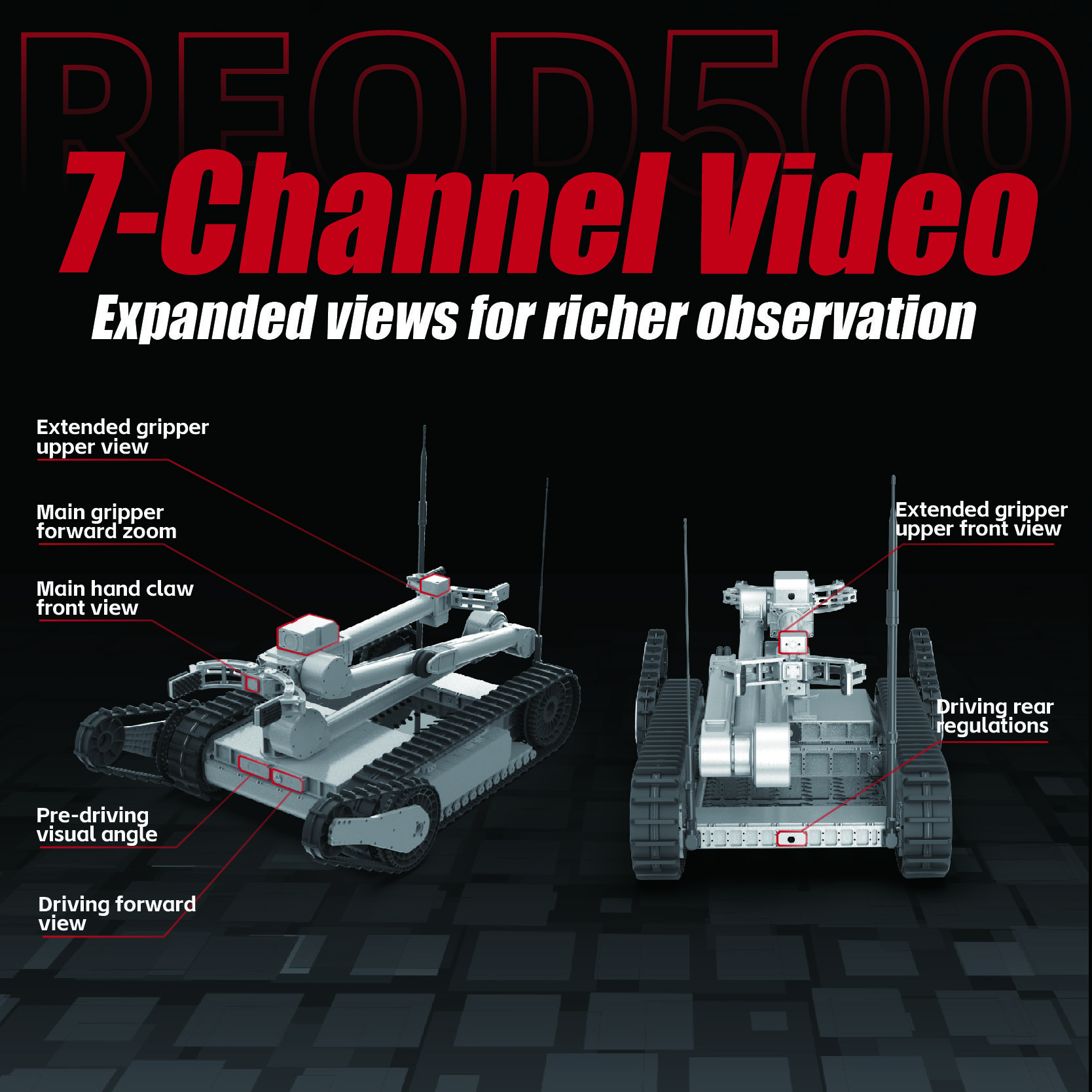
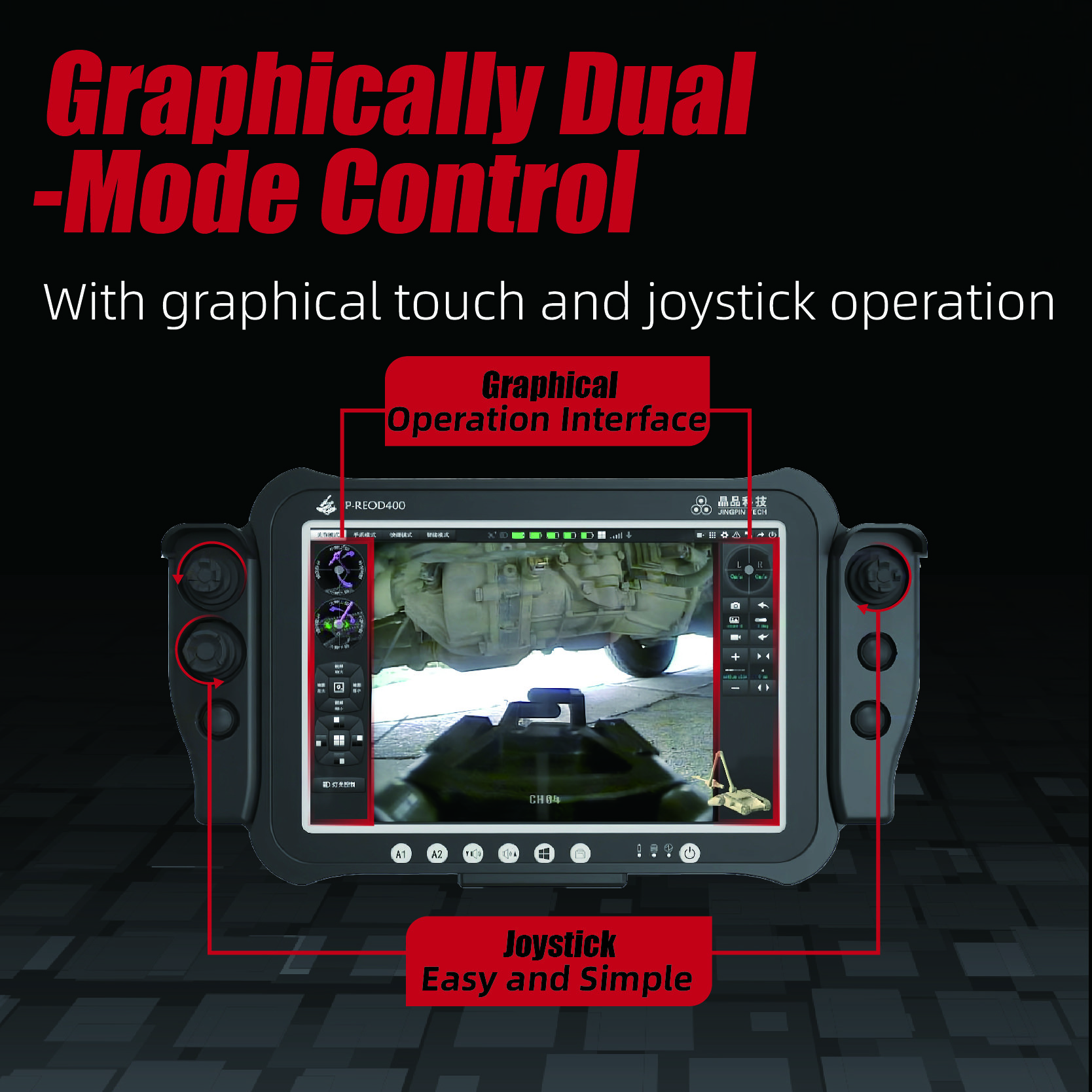
| Schermata di visualizzazione del controllo | Dispositivo LCD da 7' | Visualizzazione video | 7 canali, uno dei quali ha la funzione di zoom autofocus. |
| Metodo di funzionamento | Operazione in doppia modalità del pulsante e del touch screen | Metodo di controllo | Controllo via cavo ≥ 100m ((cavo standard),controllo wireless ≥ 1000m ((all'aperto) |
| Grado IP della piattaforma robot | Protezione IP66 | Grado IP del braccio | Protezione IP66 |
| Temperatura di funzionamento | -40°C+50°C | Temperatura di conservazione | -45°C+60°C |
| Evidenziare | Robot di eliminazione di ordigni esplosivi con braccio robotico coordinato,Robot per lo smaltimento di esplosivi medi,IP66 robot eod |
||
Descrizione di prodotto
Produttori avanzati di robot a coordinate X-Y-Z a braccio robotico di medie dimensioni
Descrizione e caratteristiche
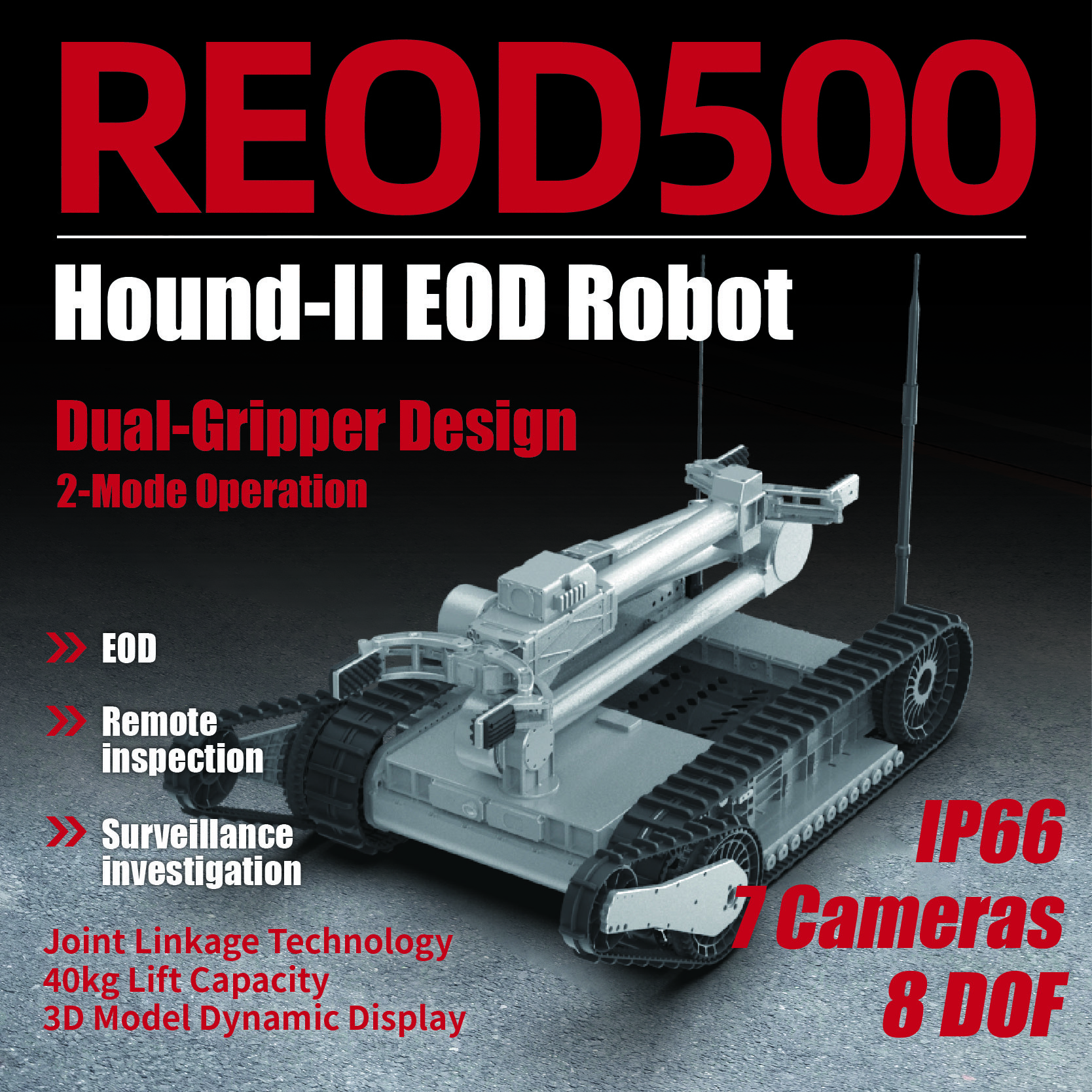
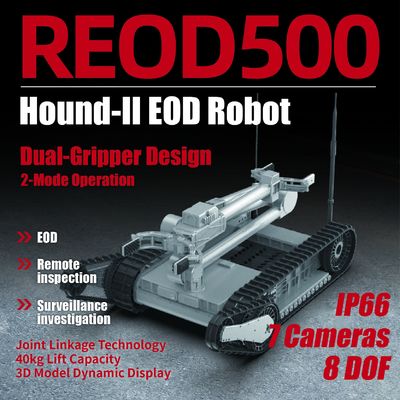
Il robot EOD JP REOD500 è una soluzione avanzata per lo smaltimento di ordigni esplosivi (EOD) in ambienti ad alto rischio.con un sistema di trascinamento a braccio d'innesto che combina il trascinatore principale con un meccanismo di ostacolo a braccio d'innesto, questa progettazione migliora significativamente le capacità di navigazione degli ostacoli del robot, garantendo prestazioni robuste e affidabili nelle operazioni di EOD.Il robot è dotato di un braccio robotico con più gradi di libertà che fornisce potenti capacità di afferrazione e manovra. Il JP REOD500 ha dimensioni ≤ 900 mm × 650 mm × 500 mm (completamente riempito) e un peso ≤ 42 kg. Ha una velocità massima di ≥ 2,0 m/s, una distanza da ostacoli di ≥ 320 mm,con un'altezza di 20 mm o più, ma non superiore a 30 mm, garantendo una manovrabilità superiore in vari terreni.
Equipaggiato con un manipolatore a 8 gradi di libertà, il JP REOD500 offre un controllo preciso con un'altezza massima di presa di ≥ 1800 mm (artiglio principale) e una distanza di presa massima di ≥ 1400 mm (artiglio principale).Il robot supporta un display video a 7 canali, che consente prospettive di osservazione più ricche e dispone di funzionalità di visualizzazione in tempo reale della postura 3D remota.un grado IP67 di resistenza alla polvere e all'acqua, e metodi di controllo che includono il controllo via cavo fino a 120 m e il controllo wireless fino a 1200 m, il JP REOD500 è costruito per l'affidabilità e la versatilità in condizioni difficili.offre opzioni di personalizzazione OEM e ODM per soddisfare esigenze operative specifiche.
Progettazione migliorata del braccio meccanico Performance di presa notevolmente migliorata
La JP REOD500 presenta un design meccanico migliorato del braccio che migliora significativamente le sue capacità di presa.Questa progettazione avanzata consente al robot di maneggiare una varietà di oggetti pericolosi con maggiore precisione e resistenza, migliorando l'efficienza complessiva delle operazioni EOD.
Progettazione innovativa di brevetti a "due artigli"
Il progetto brevettato "due artigli" consente al JP REOD500 di risolvere più compiti contemporaneamente.come afferrare oggetti mentre si aprono porte o si svolgono altri compiti ausiliari, rendendolo altamente efficace per le missioni di EOD.
Operare in doppia modalità graficamente con esperienza di funzionamento conveniente e affidabile
L'operazione grafica a doppia modalità offre agli utenti un'interfaccia intuitiva per il controllo del robot.garantire facilità d'uso e affidabilità in ambienti ad elevato stressQuesta progettazione elimina la necessità per gli utenti di memorizzare complesse funzioni dei pulsanti, riducendo il tempo di formazione e migliorando l'efficienza operativa.
Display 3D in tempo reale a distanza
La JP REOD500 utilizza una tecnologia avanzata di visualizzazione virtuale 3D per un feedback in tempo reale dello stato del robot.fornire una comprensione intuitiva e dettagliata del posizionamento e dell'ambiente del robot, anche quando opera al di là della linea di vista.
Progettazione intelligente di controllo predefinito
La progettazione intelligente di controllo "preset" consente al JP REOD500 di raggiungere automaticamente posizioni prestabilite con un solo clic, in base alle esigenze dell'utente.ridurre l'intervento manuale richiesto e garantire un'esecuzione rapida e affidabile delle attività.
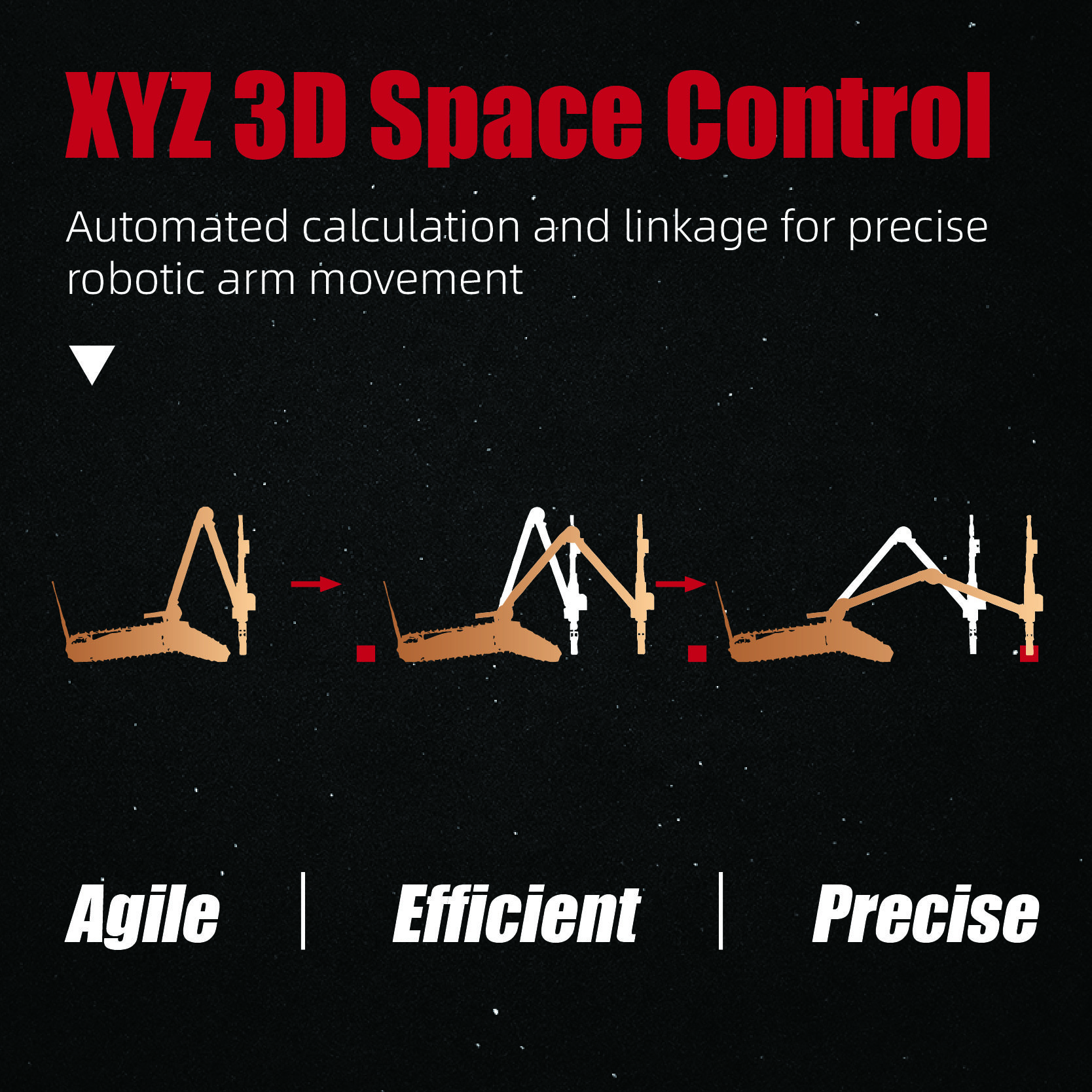
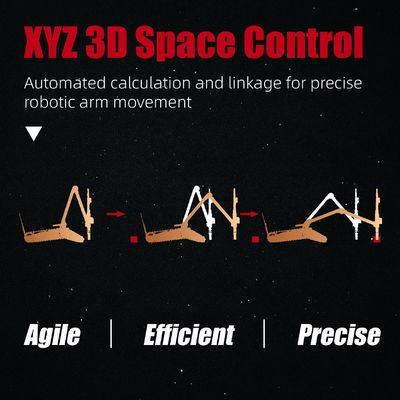
"X-Y-Z" Disegno di collegamento del braccio robotico spaziale tridimensionale
Il JP REOD500 utilizza un design tridimensionale di collegamento del braccio robotico "X-Y-Z" basato su calcolo automatico, fornendo un controllo preciso dei movimenti del robot.Questa progettazione migliora l'efficienza e la precisione delle operazioni di smantellamento delle bombe, riducendo il tempo medio di funzionamento fino all'80% rispetto al controllo tradizionale con una singola articolazione.
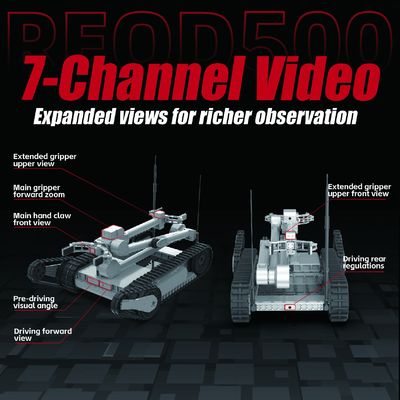
Sistema video a 7 canali Perspective di osservazione più ricche
Dotato di un sistema video a 7 canali, il JP REOD500 offre più angolazioni di osservazione per migliorare la consapevolezza della situazione.modalità di presa primaria, e modalità di presa ausiliaria, adattandosi al contesto operativo per una visione ottimale.
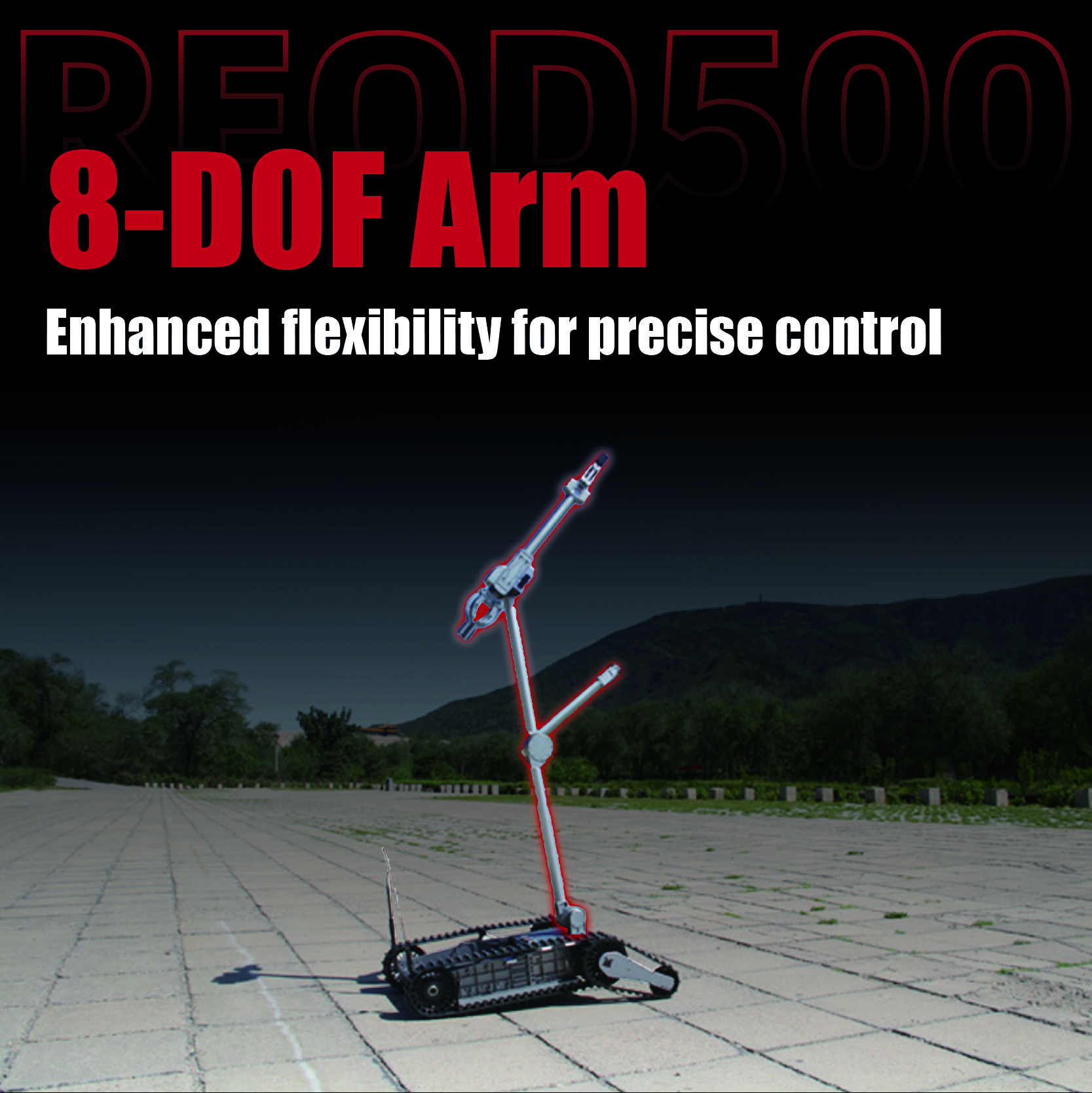
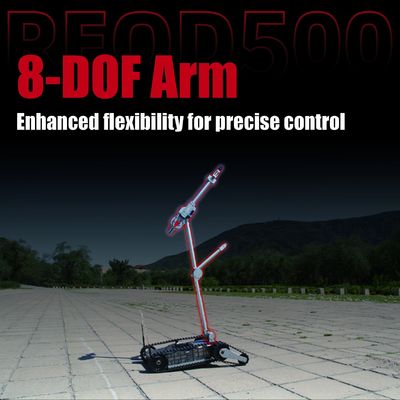
Progettazione del braccio robotico con 8 gradi di libertà Controllo più flessibile
La progettazione del braccio robotico a 8 gradi di libertà conferisce al JP REOD500 forti capacità di raggiungimento spaziale, consentendogli di eseguire compiti in ambienti alti, bassi, profondi o da tavolo.Questa flessibilità lo rende adatto a una vasta gamma di operazioni di EOD che richiedono precisione e adattabilità.
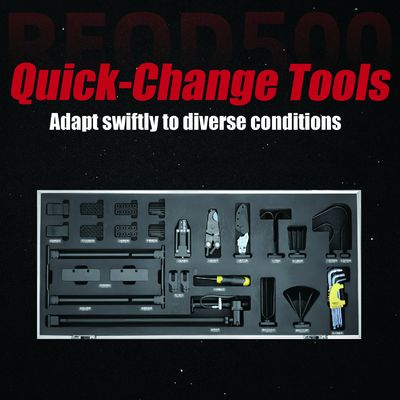
Sistema di cambio rapido di attrezzi versatile, adattabile a varie condizioni di lavoro
Il JP REOD500 è dotato di un versatile sistema di strumenti di cambio rapido, che include più set di strumenti di presa, set di strumenti di base e set di strumenti estesi.Questi strumenti possono essere sostituiti rapidamente in base alle specifiche esigenze operative, che consente al robot di adattarsi perfettamente alle varie condizioni di lavoro e di affrontare efficacemente diversi tipi di rischi.
Applicazioni
Galleria di immagini
Parametri tecnici
| Piattaforma robot | |
|
Dimensione |
≤ 950×650×650 mm ((Completamente riempito) |
|
Peso |
≤ 50 kg ((Contiene due serie di batterie) |
|
Velocità massima |
≥ 2m/s ((5 marce, variabile continuamente) |
|
Sulla capacità di superare gli ostacoli |
≥ 400 mm |
|
Larghezza della scanalatura |
≥ 400 mm |
|
Gradibilità |
≥ 45° |
|
Salire le scale |
≥ 45° |
|
Profondezza di ormeggio |
≥ 200 mm |
|
Durata della batteria (temperatura normale) |
≥ 3 ore |
|
Performance di afferramento del braccio robotico |
|
|
Lunghezza del braccio |
2000 mm |
|
Peso massimo della rapina |
≥ 40 kg |
|
Artigli |
2 |
|
Articulazioni mobili |
8 |
|
Controller portatile |
|
|
Dimensione |
≤ 270 mm × 170 mm × 100 mm |
|
Peso |
≤ 1,2 kg ((senza zaino) |
|
Schermata di visualizzazione |
Dispositivo LCD da 7' |
|
Visualizzazione video |
7 canali, uno dei quali ha la funzione di zoom autofocus. |
|
Metodo di funzionamento |
Funzionamento in doppia modalità del pulsante d'oscillazione e dello schermo touch |
|
Metodo di controllo |
Controllo via cavo ≥100m ((cavo standard),controllo wireless ≥1000m ((all'aperto) |
|
Livello di protezione e adattabilità ambientale |
|
|
Piattaforma robot |
Protezione IP66 |
|
Braccio |
Protezione IP66 |
|
Temperatura di funzionamento |
-40°C+50°C |
|
Temperatura di conservazione |
-45°C+60°C |
Contattaci
Signorina Amy.
E-mail:amy-huang@mysmech.com
Prodotti raccomandati