





















Tutti i prodotti
-
Visione notturna a infrarossi multifunzionale portatile
-
Robot per lo smaltimento di esplosivi
-
Robot di ricognizione in miniatura
-
Visione notturna digitale monoculare
-
Dispositivo di visione notturna digitale
-
Anti-Sniper
-
Radar portatile
-
Lanterna di registrazione di pattuglia
-
Equipaggiamento tattico per operazioni speciali
-
Portata del fucile
-
Telemetro del laser
-
Modello militare
-
attrezzature tattiche
-
Esca gonfiabile
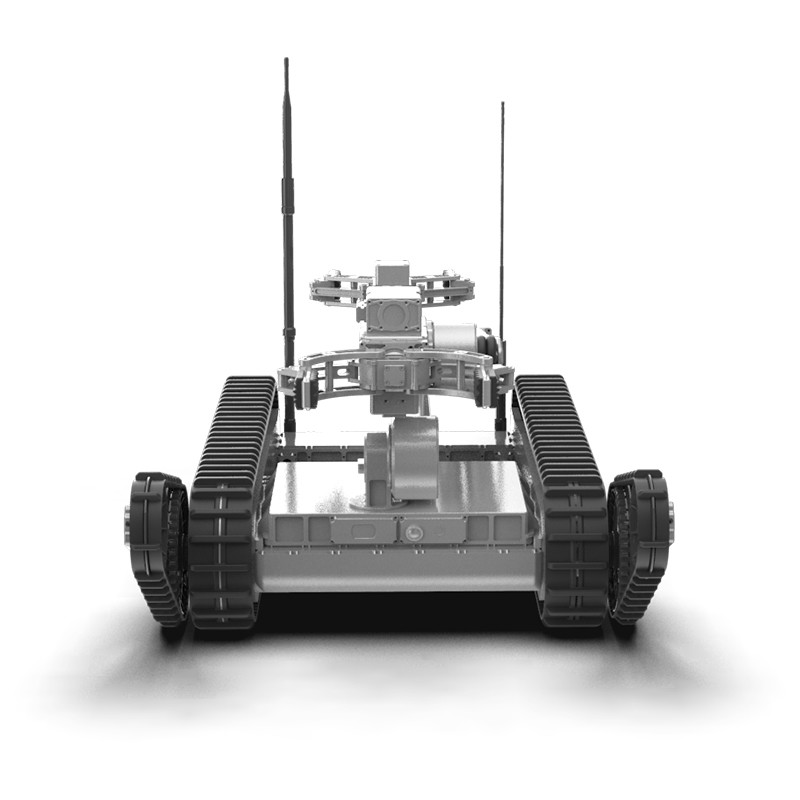
Progettazione del braccio robotico Robot EOD a controllo remoto Hound-II


| Luogo di origine | CINESE |
|---|---|
| Marca | Particle |
| Numero di modello | REOD500 |
| Quantità di ordine minimo | 1 |
| Prezzo | $205,761 |
| Imballaggi particolari | Salire le scale |
| Termini di pagamento | T/T |

Contattimi gratis campioni e buoni.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se avete di preoccupazione, forniamo la guida in linea di 24 ore.
xDettagli
| Braccio manipolatore | - Sì, sì. | Temperatura di funzionamento | -40°C+50°C |
|---|---|---|---|
| Controllo a distanza | - Sì, sì. | Salire le scale | ≥45° |
| Profondezza di ormeggio | ≥200mm | Durata della batteria ((Temperatura normale) | ≥3h |
| Dimensione del robot | ≤ 950×650×650 mm ((Completamente riempito) | Peso del robot | ≤ 50 kg ((Contiene due serie di batterie) |
| Velocità massima | ≥ 2m/s ((5 marce, variabile continuamente) | Sulla capacità di superare gli ostacoli | ≥400MM |
| Larghezza della scanalatura | ≥400MM | Gradibilità | ≥45° |
| Durata della batteria (temperatura normale) | ≥3h | Lunghezza del braccio | 2000 mm |
| Peso massimo della rapina | ≥ 40 kg | Artigli | 2 |
| Articulazioni mobili | 8 | Dimensione del regolatore | ≤ 270 mm × 170 mm × 100 mm |
| Peso del regolatore | ≤ 1,2 kg ((senza zaino) | Schermata di visualizzazione del controllo | Dispositivo LCD da 7' |
| Visualizzazione video | 7 canali, uno dei quali ha la funzione di zoom autofocus. | Metodo di funzionamento | Operazione in doppia modalità del pulsante e del touch screen |
| Metodo di controllo | Controllo via cavo ≥ 100m ((cavo standard),controllo wireless ≥ 1000m ((all'aperto) | Grado IP della piattaforma robot | Protezione IP66 |
| Grado IP del braccio | Protezione IP66 | Temperatura di conservazione | -45°C+60°C |
| Evidenziare | Hound-II Robot EOD,IP66 EOD Robot,Eod robot da 2000 mm |
||
Descrizione di prodotto
Progettazione del braccio robotico Robot EOD Hound-II a controllo remoto
|
Applicazioni Il JP REOD500 eredita il concetto di progettazione all'avanguardia dei robot della serie Hound.la combinazione del crawler principale e del crawler di ostacolo a braccio d'oscillazione migliora significativamente le capacità di attraversamento degli ostacoli del robotQuesta progettazione avanzata garantisce che il JP REOD500 possa navigare in terreni difficili con facilità, rendendolo una scelta ideale per le operazioni di EOD in diversi ambienti.
Funzionalità controllo remoto per avvicinarsi alla scena pericolosa, indagare sulle potenziali fonti di pericolo, adottare misure di smaltimento o trasferire i rischi in base agli obiettivi della missione,Proteggere i lavoratori in prima linea e il pubblico da lesioni personali.
Caratteristiche 1- Progettazione migliorata del braccio meccanico, prestazioni di presa molto migliorate; ★2. disegno brevettato "a due artigli", può risolvere più compiti contemporaneamente; 3. funzionamento in modalità grafica doppia, esperienza di funzionamento conveniente e affidabile; ★4. Display 3D a distanza in tempo reale, funzionamento preciso davanti agli occhi; ★5. Disegno di controllo "preimpostato" intelligente, impostazione personalizzata della postura di lavoro; ★6. Il design tridimensionale di collegamento del braccio robotico spaziale "X-Y-Z" basato sul calcolo automatico aiuta a controllare con precisione; 7. immagini video a 7 canali, prospettive di osservazione più ricche; 8. 8 gradi di libertà di design del braccio robotico, controllo più flessibile; 9. Una varietà di attrezzi di espansione può essere sostituita rapidamente per affrontare tranquillamente varie condizioni di lavoro;
Parametri tecnici
Dettagli REOD500
|
Prodotti raccomandati