





















Tutti i prodotti
-
Visione notturna a infrarossi multifunzionale portatile
-
Robot per lo smaltimento di esplosivi
-
Robot di ricognizione in miniatura
-
Visione notturna digitale monoculare
-
Dispositivo di visione notturna digitale
-
Anti-Sniper
-
Radar portatile
-
Lanterna di registrazione di pattuglia
-
Equipaggiamento tattico per operazioni speciali
-
Portata del fucile
-
Telemetro del laser
-
Modello militare
-
attrezzature tattiche
-
Esca gonfiabile
Robot EOD 3D intelligente a distanza per il trasferimento di oggetti pericolosi








| Luogo di origine | Cina |
|---|---|
| Marca | Particle |
| Numero di modello | REOD500 |
| Quantità di ordine minimo | 1 |
| Prezzo | $205,761 |
| Termini di pagamento | T/T |

Contattimi gratis campioni e buoni.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se avete di preoccupazione, forniamo la guida in linea di 24 ore.
xDettagli
| Braccio manipolatore | - Sì, sì. | Temperatura di funzionamento | -40°C+50°C |
|---|---|---|---|
| Controllo a distanza | - Sì, sì. | Peso | ≤ 50 kg ((Contiene due serie di batterie) |
| Fonte di alimentazione | Batteria | Mobilità | Tracce o ruote |
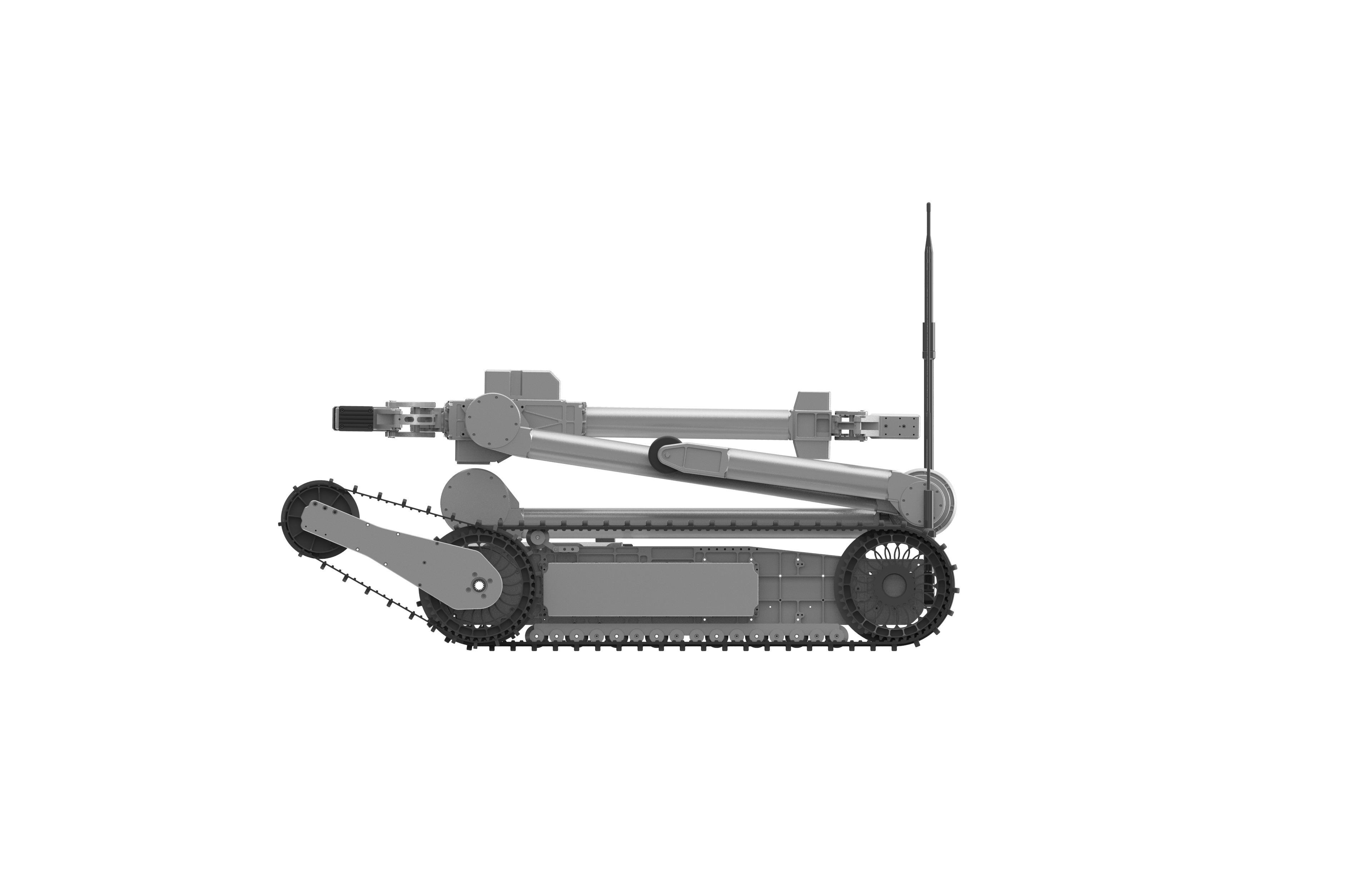
| Dimensione del robot | ≤ 950×650×650 mm ((Completamente riempito) | Peso del robot | ≤ 50 kg ((Contiene due serie di batterie) |
| Velocità massima | ≥ 2m/s ((5 marce, variabile continuamente) | Sulla capacità di superare gli ostacoli | ≥400MM |
| Larghezza della scanalatura | ≥400MM | Gradibilità | ≥45° |
| Salire le scale | ≥45° | Profondezza di ormeggio | ≥200mm |
| Durata della batteria (temperatura normale) | ≥3h | Lunghezza del braccio | 2000 mm |
| Peso massimo della rapina | ≥ 40 kg | Artigli | 2 |
| Articulazioni mobili | 8 | Dimensione del regolatore | ≤ 270 mm × 170 mm × 100 mm |
| Peso del regolatore | ≤ 1,2 kg ((senza zaino) | Schermata di visualizzazione del controllo | Dispositivo LCD da 7' |
| Visualizzazione video | 7 canali, uno dei quali ha la funzione di zoom autofocus. | Metodo di funzionamento | Operazione in doppia modalità del pulsante e del touch screen |
| Metodo di controllo | Controllo via cavo ≥ 100m ((cavo standard),controllo wireless ≥ 1000m ((all'aperto) | Grado IP della piattaforma robot | Protezione IP66 |
| Grado IP del braccio | Protezione IP66 | Temperatura di conservazione | -45°C+60°C |
| Evidenziare | Robot intelligenti eod,Hound-II robot eod,Robot per lo smaltimento di munizioni esplosive a batteria |
||
Descrizione di prodotto
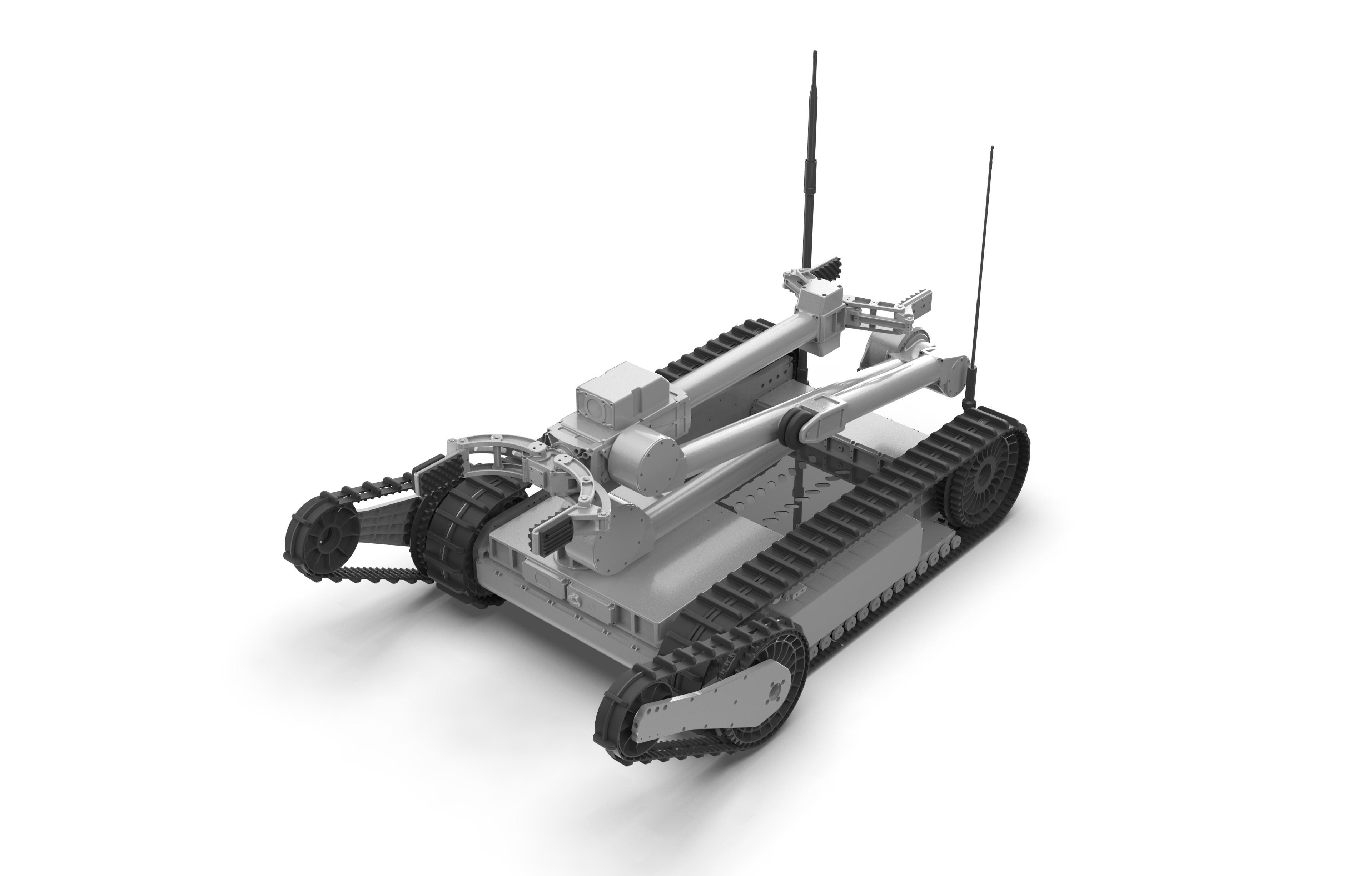
Robot EOD 3D intelligente a distanza per il trasferimento di oggetti pericolosi
|
Applicazioni Il JP REOD500 eredita il concetto di progettazione all'avanguardia dei robot della serie Hound.la combinazione del crawler principale e del crawler di ostacolo a braccio oscillante migliora notevolmente la capacità di attraversamento degli ostacoli del robot EODIl braccio robotico prosegue il progetto integrato a più gradi di libertà, fornendo al "artiglio" frontale una potente portata spaziale e prestazioni di afferrazione più forti,e migliorando notevolmente la capacità del robot di maneggiare e trasferire oggetti pericolosi.
Funzionalità controllo remoto per avvicinarsi alla scena pericolosa, indagare sulle potenziali fonti di pericolo, adottare misure di smaltimento o trasferire i rischi in base agli obiettivi della missione,Proteggere i lavoratori in prima linea e il pubblico da lesioni personali.
Caratteristiche 1- Progettazione migliorata del braccio meccanico, prestazioni di presa molto migliorate; ★2. disegno brevettato "a due artigli", può risolvere più compiti contemporaneamente; 3. funzionamento in modalità grafica doppia, esperienza di funzionamento conveniente e affidabile; ★4. Display 3D a distanza in tempo reale, funzionamento preciso davanti agli occhi; ★5. Disegno di controllo "preimpostato" intelligente, impostazione personalizzata della postura di lavoro; ★6. Il design tridimensionale di collegamento del braccio robotico spaziale "X-Y-Z" basato sul calcolo automatico aiuta a controllare con precisione; 7. immagini video a 7 canali, prospettive di osservazione più ricche; 8. 8 gradi di libertà di design del braccio robotico, controllo più flessibile; 9. Una varietà di attrezzi di espansione può essere sostituita rapidamente per affrontare tranquillamente varie condizioni di lavoro;
Parametri tecnici
Dettagli REOD500
|
Prodotti raccomandati